
Данные 9m PROJECT |
Данные 14m PROJECT |
Проведённые тесты |
|---|
В ходе подготовки к проекту 9m14m PROJECT необходимо проевести комплекс тестов для отработки основных методов наблюдения покрытий звёзд астероидами:
Каждый из этих методов вклуючает как уникальные методики, так и общие для всех. Помимо этого, методики несколько различаются для стационарных и мобильных групп наблюдателей покрытий. В зависимости от условий (высота покрываемой звезды, длительность покрытия, величина неопределённости момента покрытия, уровень засветки неба, состояние атмосферы и т.п.) и от имеющейся в распоряжении наблюдателя техники выбирается один из вышеперечисленных методов. Каждый из них имеет свои достоинства и недостатки.
Метод наблюдения покрытий дрейф-сканом применим в тех случаях, когда длительность покрытия велика (не менее 1-2 секунд), а неопределённость момента покрытия мала (не более 10-20 с). Суть метода заключается в том, что к длиннофокусному телесопу крепится цифровой фотоприёмник, телескоп наводится на нужный участок неба, и слежение за звёздами отключается. Звёзды оставляют на матрице треки. В случае наступления покрытия у трека покрываемой звезды образуется разрыв. По моменту начала и окончания экспозиции определяется время начала и конца покрытия. Сам метод дреф-скана в применении к наблюдению покрытий имеет несколько критичных параметров:
Временное разрешение. Оно напрямую завязано на длительность трека. Дело в том, что неопределённость момента покрытия часто составляет 10-30 секунд. Значит, выдержка должна быть не менее этого времени. Чаще всего при наблюдениях используем выдержку ~1 минута. Для цифромыльниц это недосягаемо -- максимум они позволяют делать кадры с выдержкой 30 секунд. Хорошо, пусть максимальное время 30 с. Тогда встаёт вопрос: какое поле зрения использовать оптимальнее? Т.е. какую кратность использовать, чтобы достичь лучшего временного разрешения? Конечно, максимальную, чтобы трек весь помещался в кадре. Идеал -- длина трека от 1/3 до 2/3 длины кадра. Почему именно такие? Потому что есть виньетирование. Нужно располагать трек максимально центрально на кадре. Виньетирование сильно портит "картину". Если длина трека будет 400 пикселей, то при выдержке 30 с, получим разрешение 30/400=0,075 с/пиксель. Для дрейф-скана временное разрешение в 0,1 с -- это очень хорошо! Но тут вступает в действие противоборствующий параметр 2...
Проницание. Длинный трек, хорошее временное разрешение -- это отлично. Но чем длинее трек (чем дольше выдержка), тем больший запас по проницанию надо иметь!
Примерный расчёт таков. Сравниваем, какие освещённости создаются звездой на ПЗС-матрице (или КМОП-матрице) фоториёмника при собирании света в точку и при дрейф-скане. Имеем "телескопскоп" с апертурой D. Имеем звезду звёздной величины m1. От звезды идёт световой поток Ф –- количество энергии, переносимое электромагнитными волнами в единицу времени через единичную площадку. Иными словами:
Ф = W/(t*S),
где W -- энергия, t -- время экспозиции, S -- площадь входного зрачка (апертура). Т.к. время экспозиции в обоих случаях (т.е. при ведении и при дрейф-скане) одинаковое, то и поток одинаковый – он определяется апертурой телескопа D. А вот как он будет перераспределяться дальше -– вот это и определит разницу в освещённости от звезды на матрице.
Освещённость Е –- это отношение потока излучения к площади площадки, которую он пересекает:
E = Ф/S
Случай накопления света в точку: Весь поток Ф фокусируется в пятнышко площадью S1 = pi*d2/4, где d -– диаметр пятнышка. Для простоты можем считать пятнышко квадратным (чтобы было удобнее сравнивать с прямоугольным треком ниже). Тогда его площадь S1 = d2.
Случай дрейф-скана: Весь поток фокусируется в трек прямоугольной формы (для простоты), размерами L×d = S2. Т.к. поток Ф постоянный, то:
Е1/E2 = S2/S1 = d*L/d*d = L/d
Формула Погсона гласит:
lg(Е1/E2) = 0,4*dm,
где dm -- искомый нами запас по проницанию. Откуда dm= 2,5*lg(Е1/E2) = 2,5*lg(L/d), или окончательно:
dm = 2,5*lg(L/d)
Теперь про значения d. Это диаметр трека. Он определяется как дисперсией, качеством оптики, так и фокусом телескопа. Для ахроматов при фокусе F = 500 мм и D = 102 мм d получался примерно 4 пикселя для DSLR-матриц цифрозеркальных фотоаппаратов Canon 30D. Получаем следующую картину. Пусть предельное проницание при экспозиции 30 секунд со слежением составляет m1. Нужно посчитать, какие по яркости звёзды мы можем "дрейф-сканить" нашим оборудованием при той же экспозиции 30 секунд и желаемой длине трека 400 пикселей (т.е. желаемом временном разрешении 0,075 с/пиксель). Получим:
dm = m2-m1;
dm = 2,5*lg(L/d) = 2,5*lg(400 пикселей/ 4 пикселя) = 5m (!)
Т.е., чтобы дрейф-сканить нашим оборудованием с предельным проницанием, скажем, 14m, при экспозиции со слежением 30 с, и временным разрешением 0,075 с, нужен запас в 5m, т.е. мы можем дрейф-сканить звёзды не тусклее 14m-5m=9m. Как видно, трек в 400 пикселей -- это мечта. При тех же параметрах и длине трека 200 пикселей получим dm = 4,25m, при этом временное разрешение будет не лучше 30 c/200 пикселей = 0,15 с/пиксель. При длине трека 50 пикселей, dm = 2,74m, временное разрешение 0,6 с/пиксель.
Получается вот такая "весёлая арифметика". Так что всё время приходится искать компромисс между длиной трека (а значит и разрешением по времени) и минимальной яркостью трека, ещё возможном для обработки. Какова эта минимальная яркость относительно фона? Часто принимают, что для нормального детектирования уровень сигнала должен быть на 10 дБ выше среднего уровня фона. На практике же приходится смотреть по ситуации и находить оптимум "уровень сигнала <-> разрешение".
Привязка начала и конца трека к точному времени. Трек надо привязать к точному времени. При этом нужно знать, что метод "одновременно нажимаем двумя руками кнопку спуска затвора (естественно, выносной затвор, который держат в руке) и секундомера", не особенно подходит для того, чтобы поставить метку начала и конца трека (когда отпускаем затвор одновременно нажимаем на секундомере кнопку и ставим вторую метку) -- разброс срабатывания того же Canon 350D по измерениям Ивана Мхитарова (ЛА из России) составляет 500 мс (если я правильно помню), для Canon 30D по нашим измерениям задержка срабатывания затвора около 50 мс, по пасспорту 65 мс, по независимым тестам от 65 до 71 мс. Для цифромыльниц значений у меня нет. Впрочем, иногда этой неопределённостью можно пренебречь.
Советую также почитать нашу статью "Оценка пригодности компактных камер для детектирования покрытий звёзд методом дрейф-скана", в которой представлены результаты наших тестов метода дрейф-скана с использованием компактной цифровой фотокамеры Canon A70. Метод дрейф-скана группой "Infinity" применялся в "боевых" условиях на покрытии звезды HIP520 астероидом (4505) Okamura 27 июля 2008 г.
В настоящее время тесты продолжаются.
Видео-съёмка покрытий -- один из наиболее точных методов их наблюдений. Временное разрешение этого метода максимально возможное из доступных любителям методов -- оно определяется временем экспозиции каждого кадра. Однако, экспозиция каждого отдельного кадра видеоролика достаточно мала (10-100 мс), в связи с чем для съёмки видео=роликов покрытий нужно использовать чувствительные камеры с опцией ROI (Region Of Interest -- "область интереса", т.е. есть возможность писать не полноформатные кадры, а область кадра, что значительно снижает поток данных и позволяет поднимать уровень FPS (frames pre second) до приемлемого уровня 20-50 FPS).
В качестве примера на картинке ниже показан отдельный кадр из видео-ролика, снятого группой "Infinity" в начала февраля 2009 г. Снималась "искуственная звезда", в роли которой выступал удалённый на ~5 км красный фонарь. На небе в ту ночь была сплошная облачность, чне не позволило провести тесты по реальной звезде. Съёмка велась с использованием телескопа системы Ньютона (апертура D = 150 мм, фокус F = 750 мм) на цифровую камеру QHY5 (выдержка 50 мс, gain 5%), видеопоток от которой перевылался по кабелю USB 2.0 на ноутбук IBM 367 MHz. Область ROI составляла 200 × 196 пикселей.
Далее записанный видео-ролик анализировался при помощи программы LiMOVIE, которую широко используют западные ЛА при наблюдениях покрытий. Эта программа позволяет произвести фотометрирование выбранной звезды для каждого из кадров и получить текстовый файл с покадровой фотометрией (по сути, развёртка фотометрии во времени). Рабочее окно программы в момент анализа показано ниже.

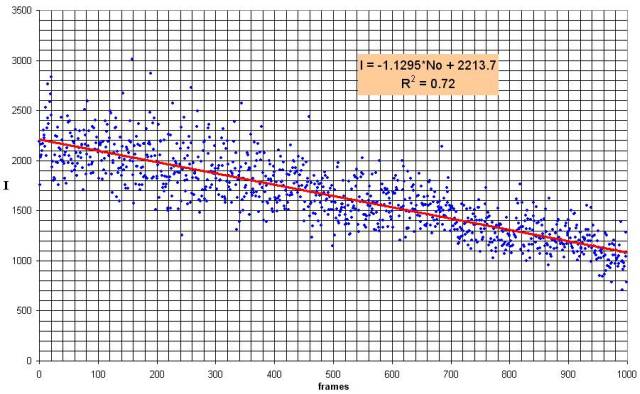
Полученный фотометрический профиль представлен ниже. Плавное уменьшение яркости тестовой "звезды" объясняется тем, что в процессе съёмки туман на горизонте сгущался всё сильнее, и фонарь перестал быть виден полностью через 5 минут после окончания записи видео-ролика.
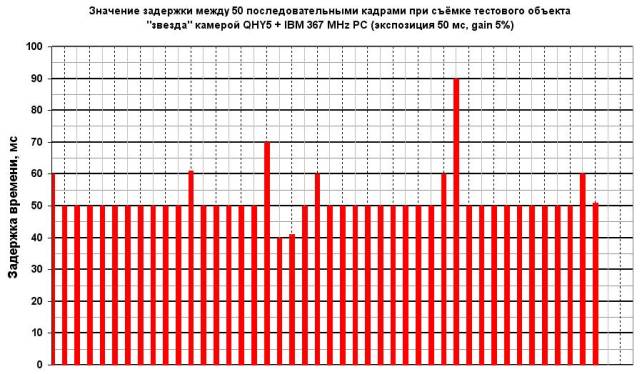
При использовании данного метода наблюдения покрытий очень важным явлеется момент меток времени на каждом из кадров. Мы использовали встроенные возможности программного обеспечения для камеры, время бралось по показаниям системного времени. Однако, у этого метода есть большой недостаток -- собственные операционные задержки Windosw OS составляют не менее 50 мс (по умолчанию), к тому же поступающий на ПК видео-поток способен "грузить" ПК, что ведёт к нестабильности периодичности меток. На основе меток времени было проведено исследование задержек между двумя последовательными кадрами для первых 50 кадров видео-ролика. Ниже показан результат вычислений. Видно, что в подавдяющем числе случаев задержка составляет 50 мс (экспозиция каждого из кадров была 50 мс), но в некоторые моменты времени это время бывает больше или меньше указанного значения, что может указывать на нестабильность определения моментов времени со стороны ПО. Более точным методом является использование комплекса на базе охранной камеры, GPS-приёмника, выдающего 1PPS-сигналы, платы титлера наподобии KIWI-OSD, которая позволяет прописывать время в каждом кадре видео-ролика минуя ПК. Этим достигаемся микросекундная точность тайминга покрытий (точное определение моментов времени).
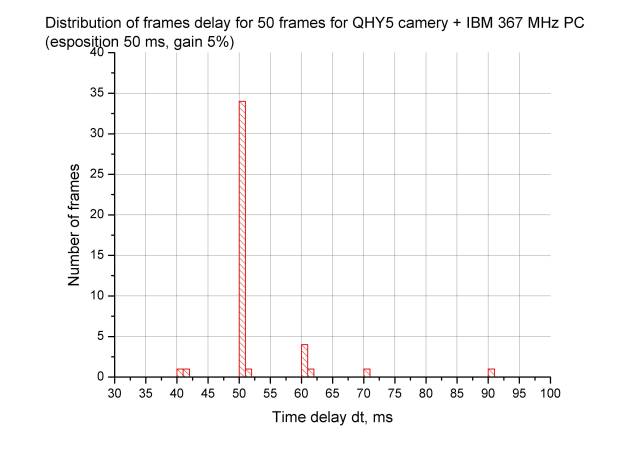
Распределение задержек по временам приведено ниже.
Метод видео-съёмки покрытий группой "Infinity" применялся в "боевых" условиях при наблюдении покрытия звезды HIP520 астероидом (4505) Okamura 27 июля 2008 г.
В настоящее время тесты продолжаются.
ПРоблема тайминга (точного определения моментов времени и точного времени) при наблюдениях покрытий -- самый важный момент. Если точное время определяется с точностью более 0,1 с, то наблюдение покрытий не имеет смысла. Таким образом, каждый наблюдатель покрытий должен прежде всего озадачиться точностью синхронизации времени. Для методов дрейф-скана и видео-наблюдений проблема синхронизации имеет свои особенности. В настоящее время самыми доступными для любителей источниками точного времени являются GPS-приёмники и радио-сигналы точного времени РВМ (RWM). Далее проблема синхронизации делится на:
Решение этих задач реализуется различными методами.
Синхронизация времени ПК: задача чаще всего решается двумя путями.
Использование синхронизации ПК по NTP-серверам сети INTERNET с обязательным контролем посредством прослушивания сигналов точного времени РВМ, т.к. при использовании NTP-серверов возможны задержки и нестабильности работы;
ПК можно синхронизироваться через интернет, используя специальные серверы точного времени (NTP-серверы) и подходящий софт. Из всего многообразия специализированного ПО мы советуем Dimension4 -- программа проста, много умеет и к тому же бесплатна.
После установки можно выбрать подходящий сервер. Чем надо руководствоваться при его выборе? Репутацией, точностью, его загруженностью, удалённостью от нас. По умолчанию используется один из серверов USNO. На синхронизацию посредством интернета сильно влияет качество и стабильность соединения. При тестах использовался провайдера "Айчына" (домашняя сеть). История коррекций системного времени представлена на картинке.
Видно, что основная часть коррекций составляет порядка ± 0.01с - отличный результат! Случайные выбросы легко идентифицировать: достаточно понаблюдать за историей синхронизаций. К слову, крайне желательно выгрузить все программы и не осуществлять никакой деятельности за компом во время синхронизаций -- в противном случае появляются "выбросы". Насколько интернет-времени можно верить? Владимир (Pova) из группы "Inifinty" сравнивал это время с сигналами РВМ -- его "органы чувств" не зафиксировали никакой разбежки. Но есть одно "но" - компьютер очень плохо хранит время, точнее - совсем отвратительно. Поэтому процедура синхронизации должна выглядеть следующим образом:
Выше писалось о том, что ПК неудовлетворительно хранит точное время. Чтобы не быть голословным, Владимир (Pova) провёл небольшой эксперимент: вечером в 2152 выгрузил Dimension4, в 2 ночи выключил ПК, утром включил ПК и в 1110 загрузил Dimension4. Dimension4 сразу провёл коррекцию системного времени на 0.447 с. Последующие коррекции составляли около ± 0.004 c. Очень высокая точность - сказывается меньшая загруженность серверов ночью (США), да и в локальной сети пока пользователи не проснулись (см. рисунок).
Несложно подсчитать, что за 798 минут отсутствия коррекций системное время ушло на 0.45 с. Конечно, уход был неравномерным (менялась температура ПК, причём существенно), но нам важно оценить порядок величины. Итого имеем: за 5 минут время ушло на 0.003 с!
При выборе NTP-сервера нужно исходить и из минимальных задержек на PING. Хотя, тесты этого постулата дали противоречивый результат:
Вова (Pova) специально провёл небольшое исследование. Подключился к польскому серверу точного времени (vega.cbk.poznan.pl, Synchronization: NTP V3 primary (Caesium clock), PC Pentium, RedHat Linux, Service Area: Poland/Europe), прописал историю... Очень неплохо - см. прилагаемый график.
Дальше разброс -- это сказалась работа за ПК (промежуток 250 - 255), потом опять наступило успокоение. В 1457 Вова сменил сервер на USNO (Synchronization: NTP V3 primary (USNO Master Clock 2, H-maser), HP9000/747i, Geographic Coordinates: 38:55:14.01 77:03:58.03 (GPS WGS84), Service Area: NSFNET) и... ничего не произошло (на графике указан момент смены сервера на трансатлантический белым квадратиком). Единственно, что познаньский сервер астрогеодинамический обсерватории для Беларуси менее загружен и задержка более стабильна.
В настоящее время исследования продолжаются...
Использование GPS-приёмников. На фотографии ниже показан комплекс на базе GPS-приёмника Garmin eTrex H и СОМ-кабеля для подключения к ПК, которым располагает группа "Infinity".
Проведённые тесты показали, что синхронизация ПК удаётся, однако остро стоит вопрос с поиском подходящего бесплатного програмного обеспечения, которое обладало бы нужной функциональностью. Тесты продолжаются...
Участники:
BelAstro.Net |
"Infinity" Group |
Витебская астрономическая обсерватория В. Невского (MPC B42) |
 |
 |
© Виталий Мечинский (Lupus), Pova и Selestia
Updated: 17.02.2009